Czym jest georadar?
Czym tak naprawdę jest georadar i jak działa? Jest to pierwsze pytanie na które trzeba sobie odpowiedzieć aby zrozumieć zasadę działania i jakie ma możliwości zastosowania.
Wyróżniamy 2 rodzaje georadarów: georadary impulsowe tzw. (ang. impulse ground penetrating radar) oraz georadary częstotliwościowe (ang. stepped frequency GPR). Powszechnie stosowane są urządzenia impulsowe, o których będzie mowa natomiast technologia częstotliwościowa dopiero się rozwija ale niesie ze sobą wiele korzyści o czym przy innej okazji. W moim artykule na www.georadar.org.pl można zobaczyć jak wygląda prototyp skonstruowany przez Raffaela Persico.
W języku angielskim stosowana jest nazwa Ground Penetrating Radar w skrócie GPR. Czasem można się spotkać z nazwą Ground Probing Radar.
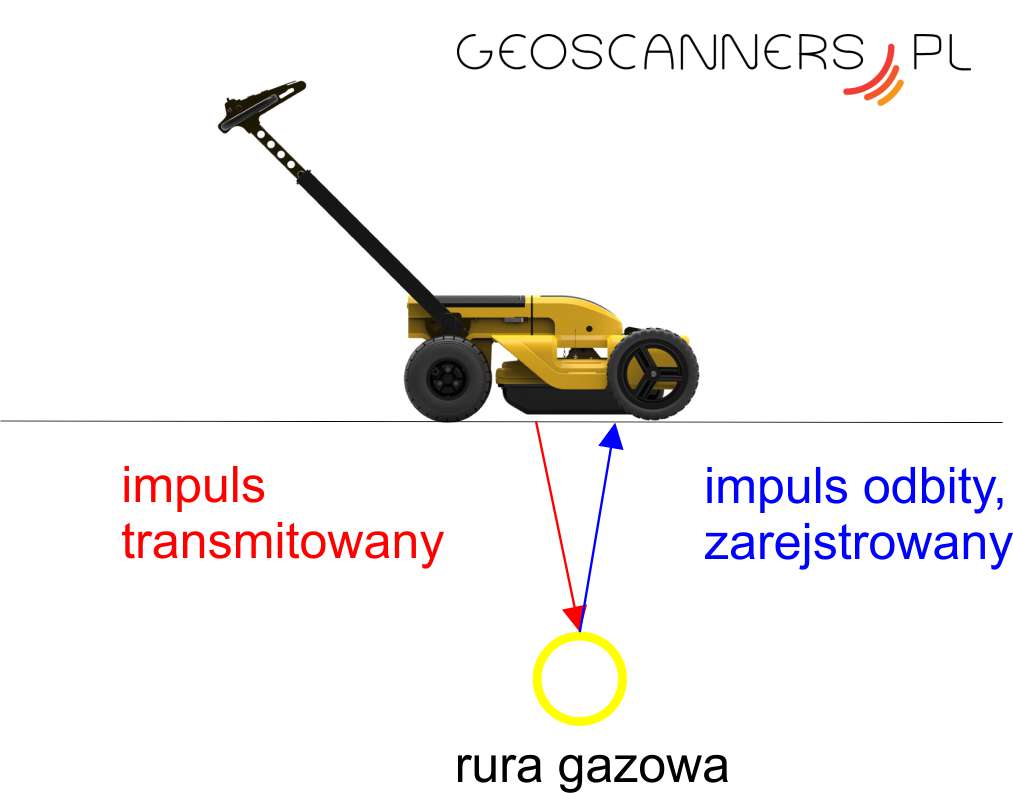
Georadar jest urządzeniem emitującym fale elektromagnetyczne i jednocześnie rejestrującym odbite fale od anomalii w badanej strukturze. Należy podkreślić, że mowa jest tutaj o metodzie refleksyjnej (fali odbitej), a są także metody refrakcyjne, profilowania prędkości, czy metody tomografii o czym będzie wspomniane w innym artykule.
Profesjonalne usługi geofizyczne
dr inż. Michał Dąbrowski
Geophysicist / Manager
e-mail: biuro@geoscanners.pl
mob: +48 796 837 252

Skaner georadarowy zawsze składa się z 3 podzespołów elektronicznych:
• Komputer lub monitor, który odpowiedzialny jest za interface,
• Jednostka centralna lub w innym nazewnictwie sterująca,
• Antena georadarowa.
Dodatkowo na wyposażeniu powyższego urządzenia pomiarowego wchodzi system do przemieszczania czyli wózek lub system ciągnięty specjalny uchwyt do ręcznego skanowania lub indywidualne rozwiązanie do specjalnego zastosowania.
Komputer
Część producentów geordarów tak jak Geoscanners AB czy georadar IDS stosuje budowę modułową czyli do jednostki sterującej możemy podpiąć jakikolwiek komputer, laptop, tablet z OS MS Windows. Systemy np. Mala Geoscience i GSSI stosują zintegrowane monitory i nie ma możliwości podłączenia innego komputera. Uważam to za minus tego sprzętu ponieważ nie mamy możliwości użycia np. nowszego hardware do sterowania georadarem.

Jednostka centralna / Jednostka sterująca
Jest to serce georadaru, najdroższa i najbardziej zaawansowana elektronika w urządzeniu. Odpowiedzialna jest za przetwarzanie sygnałów cyfrowych, próbkowanie, digitalizację sygnału, formatowanie sygnałów itd. Bardzo czułe i precyzyjne urządzenie elektroniczne, które potrafi próbkować sygnały z częstotliwością do 8 GHz. Oznacza to, że georadar potrafi próbkować sygnały cyfrowe ilością 8 miliardów próbek na sekundę. Należy pamiętać, że pomiary georadarem liczone są w nanosekundach.
Antena georadarowa
Antena jest także bardzo ważnym elementem skanera. To w niej generowane są impulsy elektromagnetyczne i transmitowane wgłąb badanej struktury. Każdy producent sprzętu georadarowego posiada w swojej ofercie szeroki wachlarz anten różnego przeznaczenia i częstotliwości. Głównie można wyróżnić anteny ekranowane i nieekranowane. Kolejny podziałem będą anteny ground (muszą mieć styczność z podłożem badanym) i air couppled, horn (pracują zawieszone w powietrzu). W kolejnym podziale można wyróżnić anteny monostatyczne i bistatyczne. Monostatyczne anteny pełnią jednocześnie rolę nadajnika i odbiornika natomiast bistatyczne wyglądają na jedno pudło ale w rzeczywistości są tam 2 anteny nadawcza i odbiorcza. Akcesoriami pomocniczymi będą kable, wózek pomiarowy, koło pomiarowe, bateria zasilająca, GPS.


Zasada działania georadaru
Metoda georadarowa jest jedną z metod geofizycznych falowych, bezinwazyjnych. Aby obrazowo przybliżyć zasadę działania można posłużyć się analogiami takimi jak radar lotniczy, policyjny oraz ssaki emitujące fale akustyczne.
Radar lotniczy – zasada działania
Radar lotniczy to urządzenie wykrywające statki powietrzne. Radar wysyła impuls elektromagnetyczny, który odbija się od samolotu i wraca do radaru. Dzięki obliczeniu czasu powrotu fali, opóźnień, zmian fazy sygnału (metody dopplerowskie) jesteśmy w stanie określić odległość i pozycję samolotu. Pasmo emisji niektórych radarów lotniczych pokrywa się z pasmem emitowanym przez niektóre georadary i ten fakt może wpływać na pomiar w pobliżu lotnisk. Różnicą jest to, że w przypadku radaru lotniczego fala rozchodzi się w izotropowym ośrodku jakim jest powietrze, które ma stałą prędkość. W przypadku georadaru ośrodek jest silnie anizotropowy i prędkości penetracji fali mogą się różnić nawet 9 krotnie!
Radar Policyjny – zasada działania
Radar policyjny jest także bardzo podobnym urządzeniem, które wykorzystuje zjawisko fali elektromagnetycznej odbitej. Podobnie jak radar lotniczy emituje falę w powietrzu. Dzięki odbiciu od pojazdów fala wraca do odbiornika i jesteśmy w stanie ustalić odległość i prędkość pojazdu.

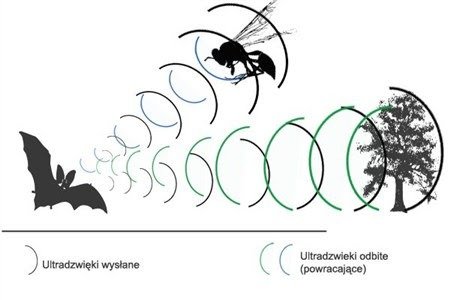
Fale akustyczne ssaków – analogia metody georadarowej
Szybką analogią dobitnie obrazującą zasadę działania georadaru jest nietoperz, który emituje ultra dźwięki w celu lokalizacji obiektów. Oczywiście trzeba pamiętać, że ssaki emitują fale akustyczne, a georadar IDS – elektromagnetyczne ale mowa jest o zjawiskach falowych, które są bardzo podobne w elektromagnetyce i akustyce.
Tryb pracy
Georadar może pracować w 3 standardowych trybach.
• Dystansowy
• Czasowy
• One shot
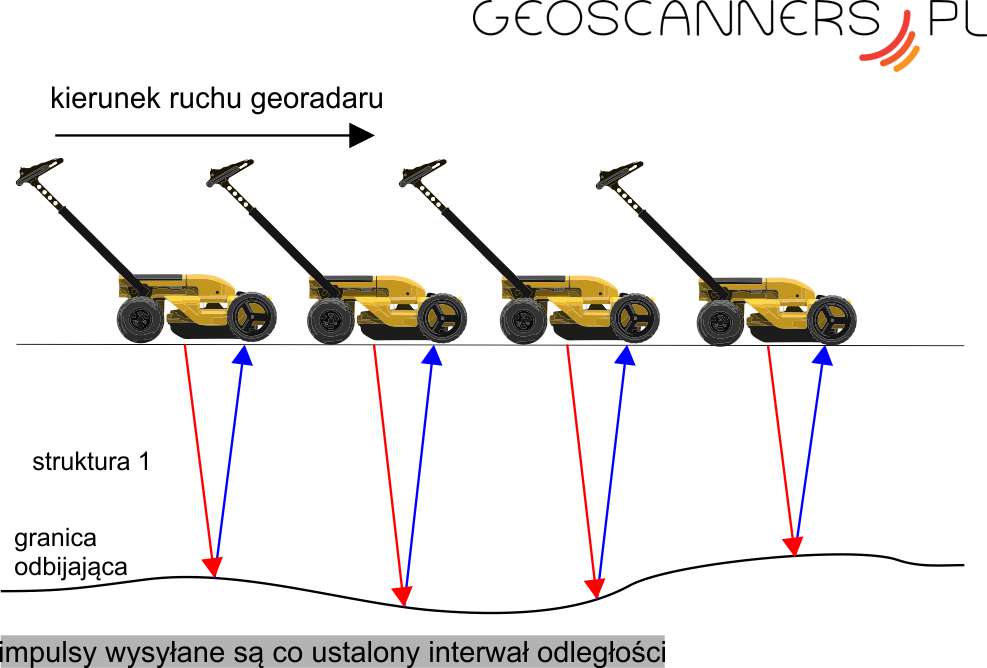
Dystansowy tryb jest najefektywniejszy i najpopularniejszy do pomiarów metody georadarowej na lądzie. Polega on na tym, że georadar IDS skanuje (wysyła impulsy) gdy się porusza. Kółko pomiarowe wysyła sygnały do jednostki sterującej i informuje kiedy mają być emitowane sygnały np. co 1 cm. Kółko obracając się odmierza dokładnie odległość co jaką mają być wysyłane fale. Jest to bardzo wygodne rozwiązanie ponieważ można zatrzymać się podczas skanowania bez wpływu na pomiar. Po przerwie można kontynuować, dopiero kółko pomiarowe obracając się będzie wzbudzać georadar IDS do wysyłania impulsów elektromagnetycznych w badaną strukturę.

Tryb czasowy metody georadarowej jest gorszym rozwiązaniem ale np. jedyną opcją na wodzie gdzie nie ma możliwości jazdy kółkiem po powierzchni. Oczywiście można skonstruować pewne łopatki i wsadzić do wody ale metoda ta nie będzie dokładna. Stosowane są techniki GPS ale należy mieć na uwadze błędy generowane przez globalne pozycjonowanie. Tryb czasowy polega na wysyłaniu impulsów przez georadar w stałych odcinkach czasu np. co 0.1 s. Warunkiem jest aby zarejestrowane trasy georadarowe (scan-A) były w tej samej odległości od siebie. Mówi się, że będą trzymać geometrię czyli będą geometrycznie spójne i w tej samej odległości od siebie. Dlatego bardzo ważnym aspektem w przypadku pomiarów na wodzie jest aby utrzymywać stałą prędkość pomiaru. GPS posłuży nam wtedy do lokalizacji pomiaru w GIS.
Kolejnym przykładem badań przy użyciu metody georadarowej jest tryb one shot specjalistyczny tryb pracy georadaru, który stosowany jest tam gdzie potrzebny jest bardzo długi czas nasłuchu na powracającą falę np. z głębokości kilkudziesięciu czy kilkaset metrów. Georadar nie byłby w stanie, w ruchu przetworzyć tak dużej ilości danych dlatego wykonuje się pomiar w jednym miejscu, a następnie przesuwa się na kolejną pozycję i tak dalej.

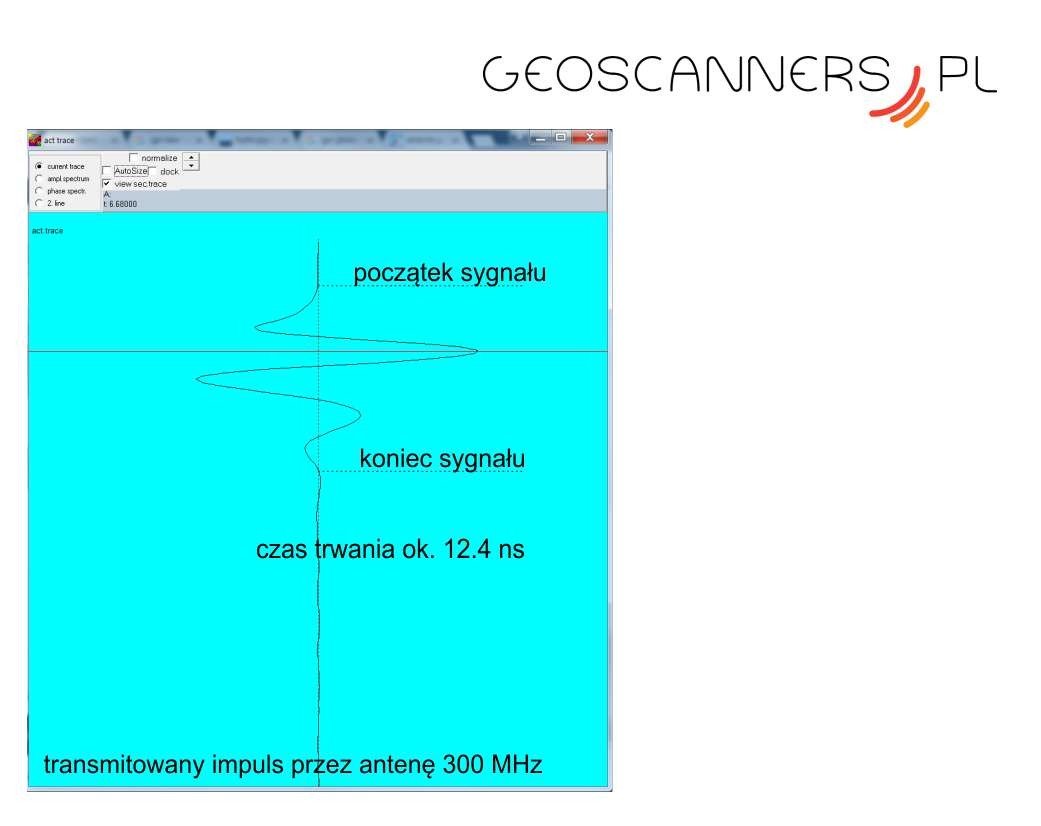
Generowane impulsy
Transmitowane sygnały elektromagnetyczne mają bardzo krótki czas trwania rzędu kilku ns w przypadku anten powyżej 1 GHz do kilkudziesięciu przy antenach o niższych częstotliwościach. Podstawową charakterystyką wysyłanych impulsów jest ich częstotliwość i zależna jest od użytej anteny. Stosowane obecnie anteny mogą generować od kilku MHz do kilku GHz w zależności od użytej anteny. Należy pamiętać, że nie ma uniwersalnego urządzenia jakim jest georadar, który można stosować do wszystkich celów. Do każdego zastosowania należy dobrać odpowiednią antenę o danej częstotliwości i ściśle z tym faktem związana jest głębokość penetracji i rozdzielczość pomiaru.
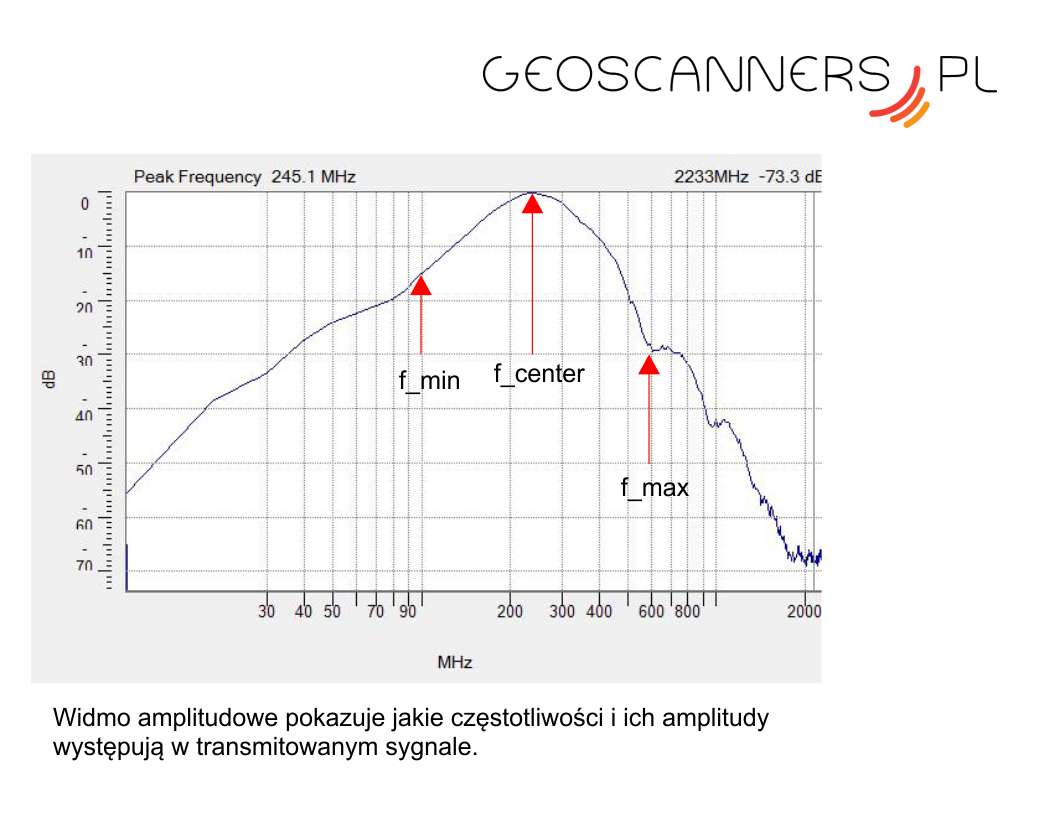
Należy zawsze pamiętać, że podawana częstotliwość anteny to częstotliwość centralna, a emitowane jest pewne pasmo częstotliwości. Na przykład firma Geoscanners AB produkuje anteny GCB-300 o częstotliwości centralnej 307 MHz. Oznacza to, ze każdy wygenerowany impuls fali elektromagnetycznej niesie ze sobą w głąb skanowanej struktury całe pasmo częstotliwości o szerokości do ok ~100 MHz do ~600 MHz. Oczywiście amplituda częstotliwości 307 MHz będzie najwyższa łagodnie opadając w stronę 100 MHz i 600 MHz. Można jeszcze pójść dalej i zaznaczyć, że antena generuje częstotliwości wyższe niż 600 MHz i niższe niż 100 MHz ale amplituda ich jest tak niska, że przyjmuje się nieużyteczna. Użyteczność sygnału określa się w dB i niektóre źródła mówią o najefektywniejszym paśmie do -10 dB. Kolejną właściwością anten i częstotliwości jest to, że wysokie częstotliwości będą tłumione wraz z głębokością co jest bezpośrednio związane z zasięgiem i rozdzielczością.
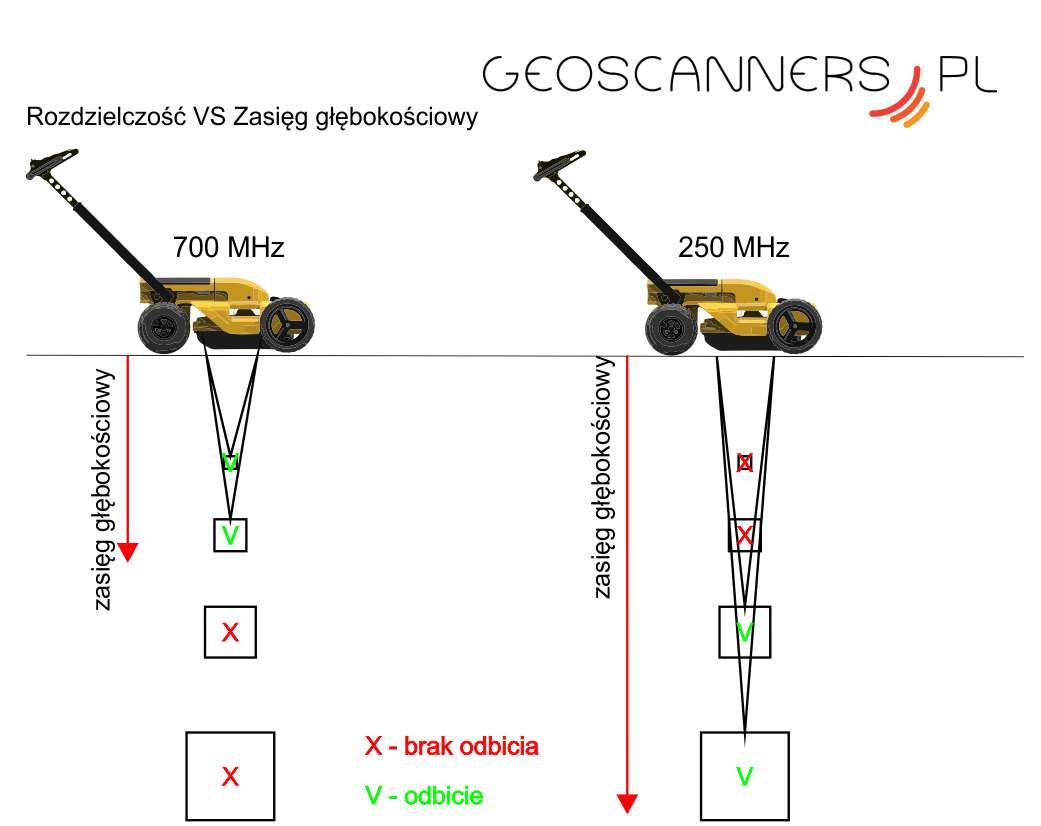
Rozdzielczość w pomiarach georadarem
Jak już wspomniano georadar nie jest urządzeniem uniwersalnym w jednej konfiguracji. Do każdego celu należy dobrać antenę odbiorczą o odpowiedniej częstotliwości. Z częstotliwości możemy wyczytać informację o głębokości i rozdzielczości. Anteny o niższej częstotliwości mają większy zasięg penetracji ale mniejszą rozdzielczość czyli zdolność do wykrywania małych obiektów. Natomiast anteny o wysokiej częstotliwości będą miały płytki zasięg ale z bardzo wysoką rozdzielczość. Każde skanowanie należy dokładnie przemyśleć i dobrać odpowiednią częstotliwość. Główne pytania jakie należy sobie zadać to:
• jaka jest głębokość badanej struktury (jaki zasięg głębokościowy dobrać)
• jaka jest wielkość spodziewanych obiektów, anomalii, nieciągłości do wykrycia.

Wskazane jest aby wybierać anteny optymalnie czyli jak najwyższą możliwą częstotliwość. Poniżej kilka przykładów anten georadarowych i ich częstotliwości, zasięg głębokościowy, i rozdzielczość. Należy pamiętać, że głębokości są podane dla przenikalności elektrycznej ośrodka ε=6 i przewodność poniżej 0.1 mS.
GCB-100 częstotliwość centralna 103 MHz zasięg głębokościowy do 15 m rozdzielczość pionowa 0.5 m czas nasłuchu 350 ns
GCB-300 częstotliwość centralna 307 MHz zasięg głębokościowy do 8 m rozdzielczość pionowa 0.15 m czas nasłuchu 120 ns
GCB-500 częstotliwość centralna 480 MHz zasięg głębokościowy do 2.5 m rozdzielczość pionowa 0.1 m czas nasłuchu 50 ns
GCB-700 częstotliwość centralna 675 MHz zasięg głębokościowy do 1.5 m rozdzielczość pionowa 0.07 m czas nasłuchu 35 ns
GCB-1000 częstotliwość centralna 1 GHz zasięg głębokościowy do 1 m rozdzielczość pionowa 0.05 m czas nasłuchu 25 nn
Oczywiście trzeba być świadomym, że do znalezienia rury kanalizacyjnej 110 mm na głębokości 2 metrów nie użyjemy anteny 200 lub 100 MHz ponieważ rozdzielczość nam na to nie pozwoli. Dlatego optymalnie do tego zadania wybrać antenę odbiorczą 500 MHz. Należy także mieć na uwadze, że wraz ze wzrostem stałej dielektrycznej ośrodka dla tej samej anteny będzie rosnąć rozdzielczość, a zasięg głębokościowy będzie maleć.
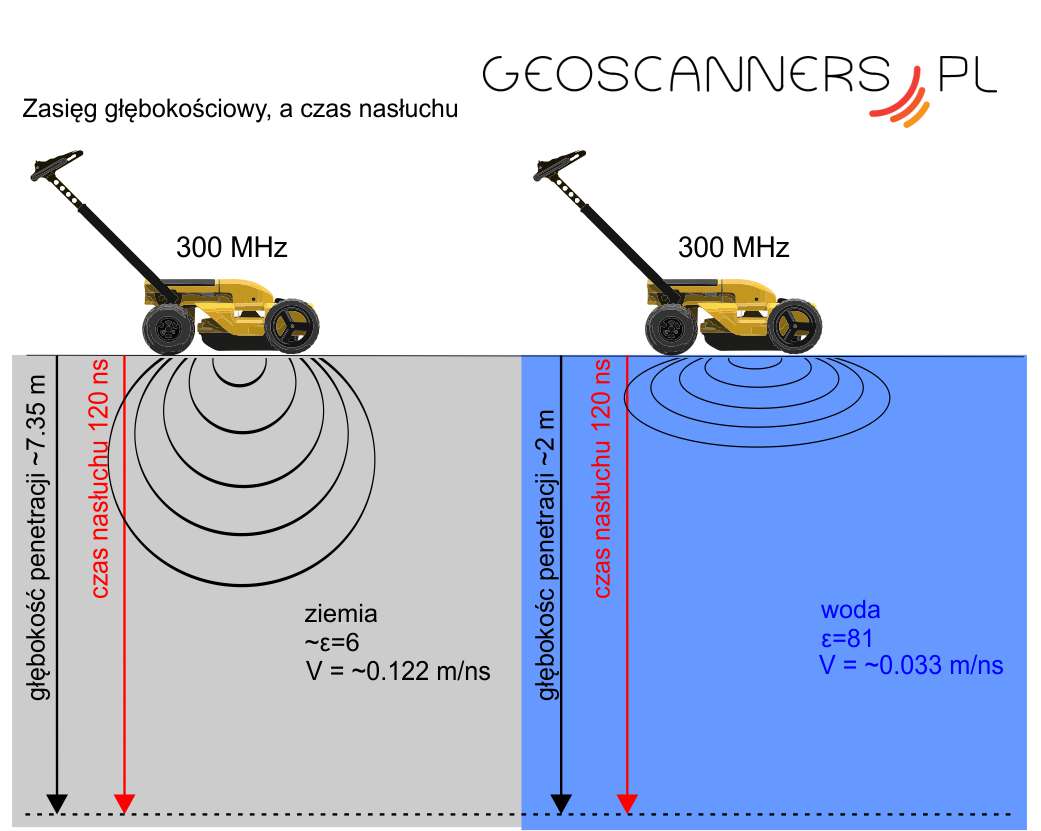
Bardzo ważnym i elementarnym aspektem zasięgu głębokościowego w pomiarach jest to, że georadarem nasłuchujemy falę odbitą powracającą z wewnątrz badanej struktury. I np. dla anteny 300 MHz głębokość penetracji jest 8 metrów przy 120 ns rejestracji i przenikalności ośrodka ε=6. Przy przenikalności ośrodka ε=36 fala będzie się poruszać dwukrotnie wolniej niż przy ε=6. To oznacza w praktyce, że w czasie 120 ns fala pokona drogę dwa razy krótszą w niezmiennym czasie nasłuchu, który jest ograniczony dla danej anteny. Fala będzie miała zasięg o połowę mniejszy czyli 4 metry! Oczywiście są to dywagacje czysto teoretyczne. Jak już wspomniano pomiary zazwyczaj odbywają się w ośrodkach anizotropowych i z każdym ruchem georadaru fala rozchodzi się z innymi prędkościami oraz częstotliwościami.
Zarejestrowane dane
Zarejestrowane dane czyli odebrane sygnały przychodzące z wewnątrz badanej struktury, są zapisywane zazwyczaj w specyficznym formacie danych dla każdego producenta georadarów. Poszczególne firmy mają swoje formaty przetwarzania danych:
Geoscanners AB format danych *.GSF
GSSI format danych *.DZT
Mala Geoscience format danych *.RD3, RD6, RD7
Georadar IDS format danych *.DT
VIY format danych *.SGPR
Pulseekko format danych *.DT1
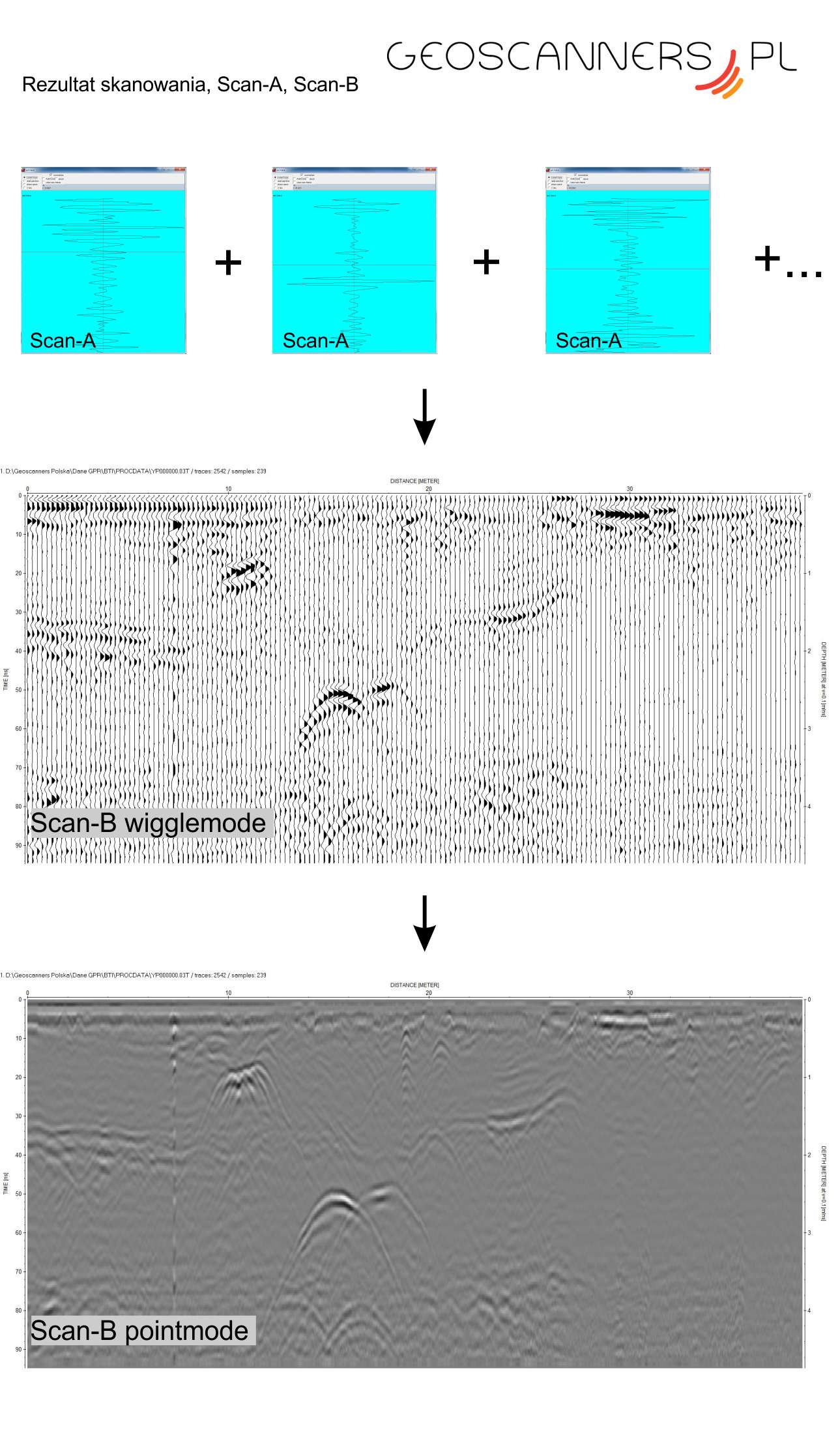
Dane oprócz zapisu, wyświetlane są na monitorze komputera lub zintegrowanego modułu. Pozwala to na kontrolę jakości pomiaru i w razie potrzeby interpretację scan-B (zarejestrowanych danych 2D). Dane wyświetlają się w następujący sposób: kolejne odebrane impulsy wyświetlane są obok siebie na ekranie monitora. Każdy zarejestrowany impuls składa się z szumów koherentnych i niekoherentnych oraz sygnału użytecznego. Sygnał użyteczny reprezentowany jest przez odbicia od szukanych lub mapowanych struktur. Georadar na ekranie wyświetla kolejne skany (A-scan, 1D) co założony dystans. Każdy skan 1D (A-scan) można uznać jako oscylującą falę wokół osi zero. Wartości fali elektromagnetycznej, które są wychylone na dodatnią stronę georadar obrazuje na biało, natomiast wartości ujemne przyjmują kolor czarny (mowa o palecie mono w skali szarości). Paletę można wybrać inną ale najczytelniejsza i najlepsza jest w odcieniach szarości. Takie pojedyncze pokolorowane sygnały wyświetlane i uśredniane pomiędzy sobą tworzą scan-B czyli przekrój georadarowy 2D.